前辅文
第一篇 分析建模
第1章 绪论
1.1历史沿革
1.2柔性机构的优缺点
1.3柔性机构的应用
1.4分析与综合方法概述
1.5本书内容
参考文献
第2章 基本概念
2.1柔性单元、柔性铰链、柔性机构与柔性模块
2.2线性变形与非线性变形
2.3行程与载荷
2.4强度与应力
2.5刚度与柔度
2.6自由度与约束
2.7精度: 轴漂与寄生运动
2.8材料选择
2.9加工方法概述
参考文献
第3章 柔性单元的柔度建模
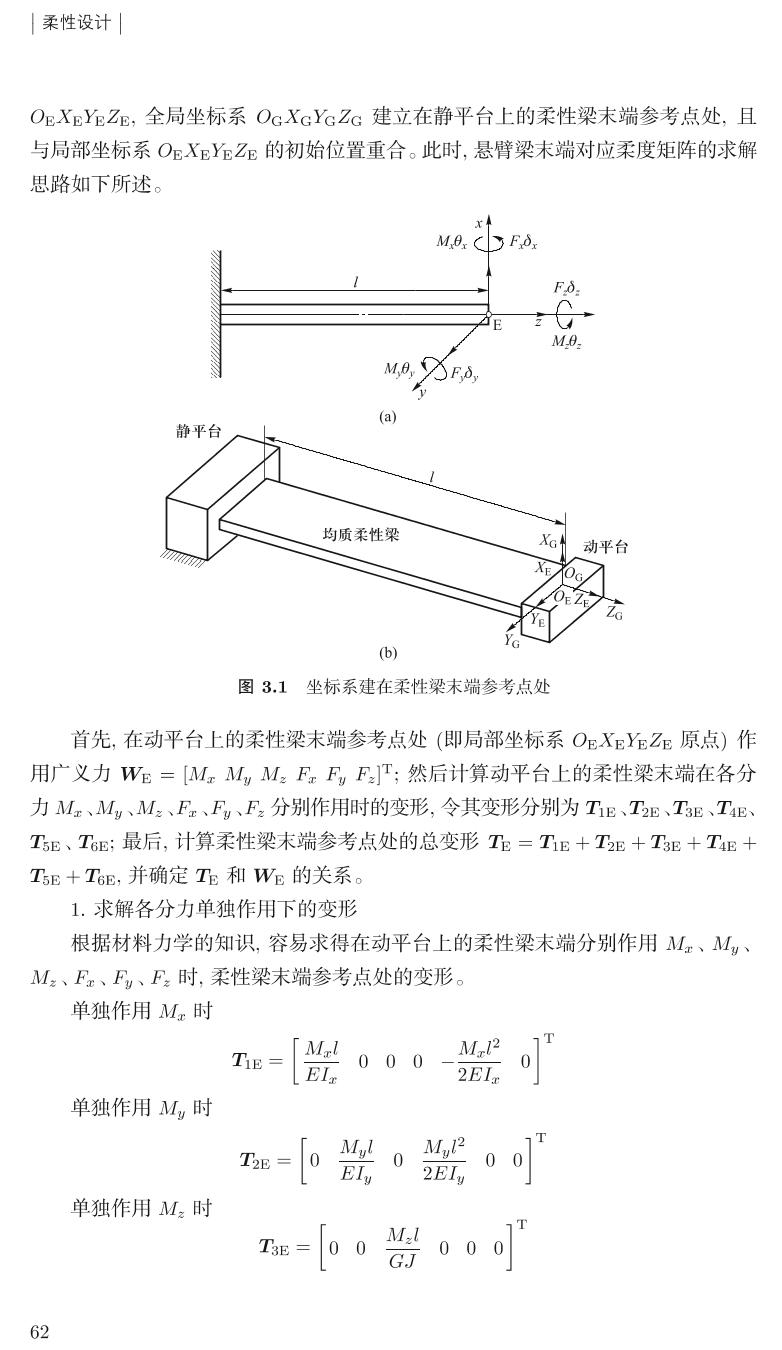
3.1小变形条件下柔性梁的一般力学模型
3.2基于旋量理论的柔度建模
3.3大变形柔性单元的伪刚体模型
3.4大变形柔性单元的约束模型
3.5有关柔度概念的分类思考
3.6本章小结
参考文献
第4章 柔性模块的建模与性能评价
4.1主要性能参数
4.2基于旋量理论的柔度建模与性能评价
4.3等效伪刚体建模与性能评价
4.4基于梁约束模型的柔性模块性能分析与评价
4.5本章小结
参考文献
第5章 柔性机构的主运动与寄生运动分析
5.1柔性单元的等效自由度与约束模型
5.2基于图谱法的自由度与过约束分析
5.3基于特征柔度矩阵的自由度分析
5.4柔性机构的寄生运动分析
5.5本章小结
参考文献
第6章 柔性机构动力学基础
6.1柔性动力学建模方法简介
6.2单自由度柔性机构的动力学建模
6.3多自由度柔性机构的动力学建模
6.4柔性动力学实验
6.5本章小结
参考文献
第二篇 设计综合
第7章 图谱化构型综合
7.1图谱化构型综合的基本思路
7.2子空间
7.3常见柔性铰链及柔性机构的分类综合
7.4多轴柔性机构的图谱化构型综合
7.5并/混联柔性机构构型综合的深层考虑
7.6柔性机构的驱动空间
7.7本章小结
参考文献
第8章 参数化刚度综合
8.1刚度与自由度之间的映射关系
8.2刚度综合流程
8.3综合实例
8.4应用实例: 一种2--DOF 重力梯度敏感机构的刚度设计
8.5本章小结
参考文献
第9章 胞元设计
9.1胞元设计的基本思想
9.2基于模块分层的构型设计
9.3基于特殊柔性胞元的大行程柔性机构设计
9.4胞元结构与柔性设计
9.5本章小结
参考文献
第10章 基于误差补偿的精度设计
10.1柔性机构的误差源
10.2基于刚柔寄生运动相互补偿的单轴柔性机构精度设计
10.3基于约束特性的误差补偿原理与单轴柔性直线机构设计
10.4基于寄生运动补偿的多轴柔性机构设计
10.5对称设计提高精度的原理性论证
10.6本章小结
参考文献
第11章 屈曲设计
11.1屈曲设计的灵感来源
11.2基于屈曲理论的挠曲线构型法
11.3DC 型柔性铰链的设计与性能分析
11.4本章小结
参考文献
第12章 考虑能效的柔性设计
12.1驱动器选择
12.2柔性运放机构的设计
12.3柔性静平衡机构的设计
12.4本章小结
参考文献
第三篇 设计实例
第13章 大行程柔性轴承
13.1柔性轴承及其应用
13.2广义三交叉簧片型柔性轴承的设计、分析与测试
13.3内外环柔性轴承的设计、分析与测试
13.4本章小结
参考文献
第14章 大行程$bmXY$ 柔性工作台
14.1构型设计
14.2参数设计
14.3原型设计与性能测试
14.4本章小结
参考文献
第15章 柔性微操作机器人
15.1典型的微操作机器人系统
15.2典型的微操作机器人机构
15.3 3维平动柔性微操作机构的构型综合
15.4混联式柔性微操作机构的参数设计
15.5微操作机器人系统自动对接实验
15.6本章小结
参考文献
附录 旋量理论基础及图谱表达
A.1 旋量理论基础
A.1.1 旋量
A.1.2 运动旋量与力旋量
A.1.3 旋量的互易积与约束旋量
A.1.4 旋量系与旋量空间
A.1.5 运动旋量系与约束旋量系
A.2 旋量理论的图谱化表达
A.2.1 基本概念
A.2.2 自由度(约束) 等价线
A.2.3 冗余线
A.2.4 对偶法则
A.2.5 自由度与对偶约束空间图谱
参考文献
索引
彩插